
关于作者

自动扶梯事故典型案例分析
力学园地
2016年01月04日自动扶梯事故典型案例分析
陈光南1? 赵伯锐2 马培忠3 朱衍勇4
1中国科学院力学研究所,北京 100190
2北京市特种设备检测中心,北京 100029
3 国家电梯质量监督检验中心,廊坊 065000
4 国家钢铁材料检测中心,北京 100081
摘要
根据断口特征和受力状态分析,探讨了某品牌自动扶梯驱动主机与座板联接螺栓的疲劳破坏原因。该螺栓疲劳断裂很可能缘于驱动主机系统的异常振动以及螺栓长度不足导致螺栓与座板啮合段螺纹根部的应力高度集中。电机系统动力学特性分析进一步表明:系统之所以发生异常振动,缘于制造商对该系统联接方式进行的不当设计变更。关键词:自动扶梯;螺栓振动;疲劳断裂
???? Analysis on a typical case of elevator safety accident
?? Chen Guangnan1 ??Zhao Borui2? Ma Peizhong3 ?Zhu Yanyong4
1:Institute of Mechanics, Chinese Academy of Science, Beijing 1001902:Beijing Special Equipment Inspection & Testing Center,Beijing 100029
3:National Elevator Inspection and Testing Center, Langfang, Hebei 0650004:National Iron & Steel Inspection & Testing Center,Beijing 100081
ABSTRACT
According to the rupture characteristics and the stress state analysis, the fatigue mechanism was discussed on the screw bolt connecting the main drive motor and the bedplate of the elevator system. It is pointed out that the fatigue fracture of the bolt probably arose from abnormal vibration of the motor system, and the thread root fracture was largely attributed to the severe stress concentration due to the shortened length. The analysis on the dynamic characteristic of the motor system shows that the abnormal vibration should be induced by the inappropriate design change.Key words: elevator; screw bolt vibration; fatigue fracture
- 1.? 事故的基本情况概述
2011年,某品牌自动扶梯发生了导致人员伤亡的严重事故。事后勘查发现:该事故起因于其自动扶梯驱动主机与前座板的一枚(①号)联接螺栓疲劳断裂(见图1和图2)。这一断裂引发了其后的一连串破坏。首先受影响的是联接主机与同一座板的另一枚(②号)螺栓,因其与座板螺孔啮合部分的螺纹被切断而拔出;紧接着是驱动主机,因其与底座失去联系,在主驱动链负载的拉动下驱动主机向后倾斜并扭转、移位,随之主驱动链从驱动主机小链轮上脱离,扶梯梯路承载运行系统失去上行驱动力而在乘客载荷作用下逆转下滑,最终酿成灾难性后果。
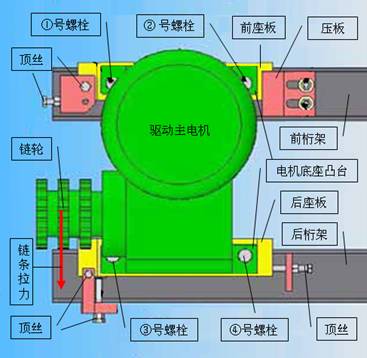
图1:驱动主机及其支撑系统示意[1]
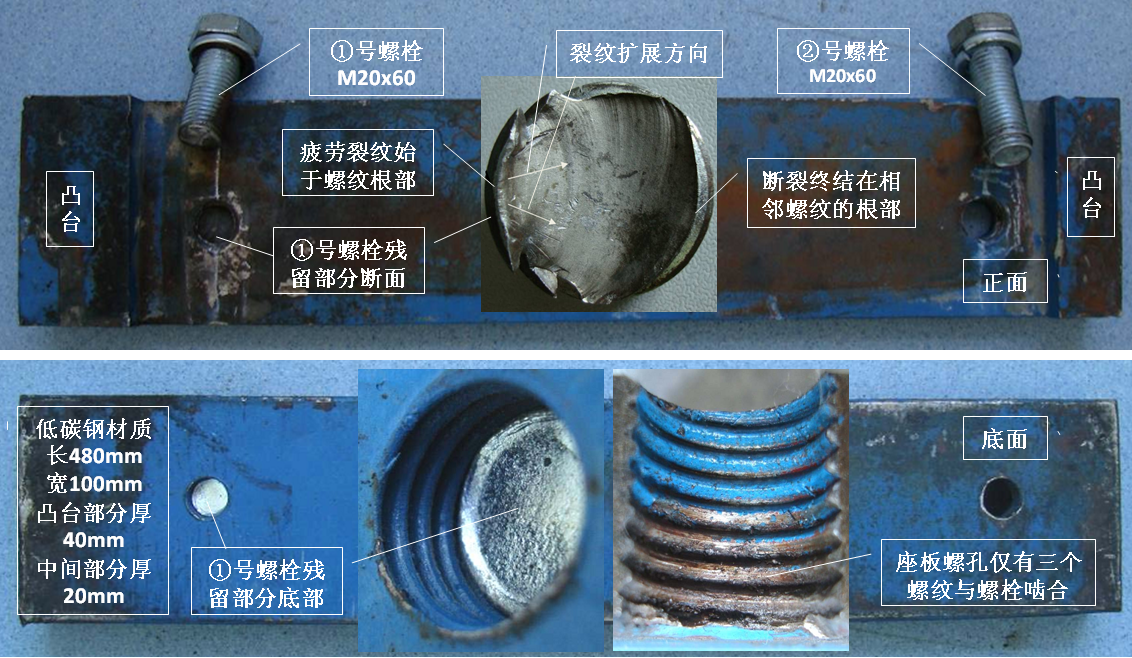
图2 事故扶梯驱动主机的前座板及联接螺栓实物照片[1,2]
- ①号螺栓断裂原因讨论
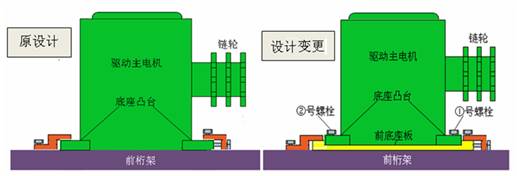
在讨论螺栓的长度问题之前,需要先弄清与其关系密切的座板的来历。这两块座板是因为驱动主机的底座尺寸小于设计要求而设置的,是自动扶梯制造商设计变更的产物。由于插入了座板,主机与支撑桁架的直接联接方式,也不得不改变为主机联接座板、座板再与桁架联接的间接固定方式(见图3),由此还增加了联接主机和座板的四枚螺栓。这种间接联接方式不仅会降低系统的抗振能力;还会因为采用螺栓-螺孔而不是螺栓-螺帽固定而降低结构的承载能力;特别需要注意的是,负责传递主机振动载荷的这四枚联接螺栓的长度比设计要求短了5mm,其直接后果是它们与螺孔啮合部分的螺纹数由五个减少到三个(见图2b),啮合部分所承受的应力因此增长了2/3,其发生断裂的风险也因此大幅度增加。至于发生断裂的为什么是螺栓而不是底座板?这或许是该螺栓螺纹根部的应力强度高于底座板的缘故。
由前向后正视图
由后向前正视图
图3设计变更前后电机与前底座板以及前桁架连接方式变化示意
主机底座凸台的倾斜度测量结果是[1],内高外低,斜度约2 。在这种斜面上预紧螺栓,的确有可能在螺栓中产生弯曲应力。但由此断言是这一弯曲应力导致①号螺栓疲劳断裂,我们认为尚需斟酌。首先,这一弯曲应力即使存在,也应该是恒力,它不可能导致疲劳破坏。其次,该弯曲力在螺栓中产生的应力应该是左侧为压应力,右侧为拉应力,这就是说,该螺栓的疲劳裂纹源应该出现在其右侧而不是左侧,而这一判断与该螺栓实际断口(图2a中部照片[2])的观察结果正好相反。
根据事故扶梯设计方提供的计算依据,该螺栓的强度满足使用要求。材料检测结果也表明,该螺栓的材质和性能符合设计要求【2】。因此,①号螺栓发生疲劳破坏只剩下了一种可能,即其在破坏之前承受了异常动载荷。现在,需要解决的关键问题是寻找这异常动载荷的来源。
- 3.? ①号螺栓异常动载荷来源分析【3】
我们知道,自动扶梯的运行是通过驱动主机旋转将电能转变成机械能实现的。这个过程中,或多或少总有一部分能量会转变成电机及其支撑系统的振动能。换言之,在自动扶梯运行时,驱动主机及其支撑系统实际上始终处于振动状态。不过,一般情况下,这种振动都被控制在很微弱的范围,不至于影响电机系统的正常工作,除非系统经受了超出设计允许的动态外载荷,或因某种缘故改变了系统的固有频率。对于本案例,调查结果表明[1]事故当时的载荷并未超过该自动扶梯的允许载客流量,该自动扶梯制造商采取的设计变更方案因此成为可能引发电机系统异常振动的首要原因。为此,本文分析了上述设计变更对电机振动系统动力学特性的影响。
3.1 电机系统振动幅度影响因素讨论[3,4]
简便起见,将电机系统简化为单自由度弹簧振子系统,设其刚度为K、质量为M,在频率为 的谐激励F0sin( t)作用下,忽略阻尼效应,其稳态幅频响应关系可表达为:
X=HF0ei t????????????????????????????? (1)
式中,频响函数H是激励频率、系统刚度和质量的函数,H( , K, M)=|K- 2M|-1?????????????????????????? (2)
对于自动扶梯的电机系统而言,从稳定性和安全角度考虑,显然希望其运行时的振动幅度尽可能小。据此我们来讨论,在激励频率已经给定的情况下,系统的刚度K和质量M是如何影响其振动幅度的。变换(2)式为如下形式:H( , K, M)=H(K)=K-1|1-[ /(K/M)0.5]2|-1? ???????????(3)
绘出以系统刚度为变量的频响函数曲线如图4所示,可知当(K/M)0.5/ =1或(K/M)0.5= 时,系统将会发生共振,这是自动扶梯设计与制造需要绝对不允许的情况;在其左侧区域,即(K/M)0.5/ <1或 (K/M)0.5< 区间,系统的振动幅度随刚度减小而降低,K=0时,其极小值为( 2M)-1,这一区间显然不适合需要足够刚性的自动扶梯电机系统设计要求;在其右侧区域,即(K/M)0.5/ >1的区间,在系统的质量和激励频率给定的情况下,刚度K愈大,振幅愈小,系统运行愈安全。前面已经提到,本案涉及的系统设计变更主要是,在驱动主机和桁架之间增加了两块垫板和四个联接螺栓。与主机和桁架的质量相比,座板的质量是小量,其增减对电机系统质量M的影响很小、可以忽略。但由于垫板与电机、底座的串联特征(其尺寸形状参见图2),它的加入将显著降低系统刚度,并使其自身成为系统承受振动载荷时的柔性区。而由图4可知,K愈小,系统振幅将愈大,因此导致的动载荷也将愈大。
![`]6Y[LIB~~7AU99PAR~[XTF](/blog/uploads/sites/29/2016/01/6YLIB7AU99PARXTF.png)
图4 系统的振幅与刚度的关系示意[4]
3.2 刚度变化影响系统振动特性的有限元分析[3,4]
为进一步具体化“串联”垫板对电机系统振动特性的影响,分别对设计变更前后的电机系统建立了动力学有限元模型(离散网格如图5所示)进行数值计算。结果表明系统的前三阶振动频率因此发生了显著变化:原设计(直接联接形式)为117.40 Hz、138.63 Hz和204.97 Hz,设计变更(间接联接形式)后变化为64.314 Hz,70.638 Hz和96.324 Hz,分别下降了45%、49%和53%。
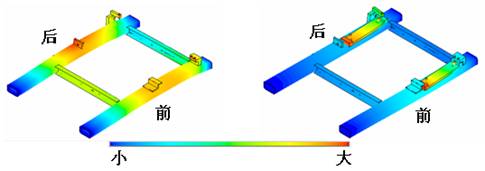
图5:原设计和设计变更振动系统模型
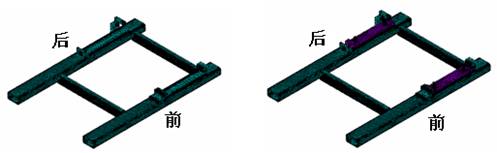
图6:系统一阶振型【3】
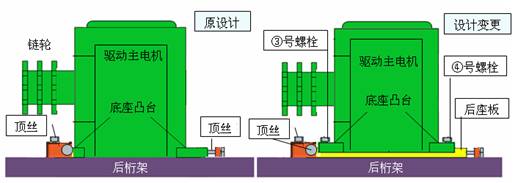
以彩色等值云图表示电机系统的一阶振型下的相对位移分布(见图6,其中红色为最大值、蓝色为最小值)不难看出:对于原设计结构,振动幅度最大的区域是后桁架的电机右下底座所在部位。因为,在电机的四个底座中,右下角底座区域受到的铅垂方向约束最弱(参见图1和图3的下图)。设计变更后,因为增加了垫板,电机与桁架不再直接联接,系统的大位移区域转移到刚度最低的两块垫板、特别是垫板的右端,即②号和④号螺栓所在的部位。至于座板两端的振动幅度为什么会不一样、即②号和④号螺栓所在部位的振幅为什么明显高于①号和③号螺栓所在的部位,结合图1、图3和图6就不难理解,其原因也是座板的①号和③号螺栓所在部位铅垂方向(由顶丝抵压)的约束强于另一端。事实上,如果再考虑由链轮传递的拉紧力作用(参见图1、图3),由该力对电机系统产生的力矩主要通过①号和③号螺栓的内力构成的反力矩来予以平衡。换句话说,由链条拉力形成的力矩,将在①号螺栓中产生拉应力,而在③号螺栓中产生压应力,即在联接电机与座板的四个螺栓中,①号螺栓所承受的拉应力是最大的。这也从另一个角度说明,为什么疲劳断裂的是①号螺栓而不是其它螺栓。- 4.? 结论
n 未按设计要求配置联接件,即采用的联接螺栓长度过短,导致了①号螺栓断裂和②号螺栓脱扣,进而致使主机倾覆。
参考文献:
[1] 国家电梯质量监督检验中心,技术鉴定报告,2011年9月。
[2] 国家钢铁材料测试中心,分析报告,2011年9月。
[3] 中国科学院力学研究所,①号螺栓断裂原因力学分析报告,2011年10月。
[4] 吴臣武,陈光南,结构刚度变化对系统谐激励响应的影响(待发),2012年。